The semantics module in pySLAM provides sparse semantic mapping and image segmentation within the SLAM pipeline. It is intended for rapid prototyping, benchmarking, and evaluation of semantic mapping and segmentation methods. When paired with the volumetric mapping module, it also enables semantic volumetric mapping.
- Semantic Mapping and Segmentation
- Enable sparse semantic mapping and segmentation by setting:
kDoSparseSemanticMappingAndSegmentation=True # enable sparse mapping and image segmentation
- Run the
main_slam.pyexample to run Segformer (trained on Cityscapes) on the default KITTI video.
For testing the open-vocabulary feature: change the semantic segmentation model to:
kSemanticSegmentationType="CLIP" # in config_parameters.pyThen change your query word in semantic_segmentation_clip.py to your desire.

The sparse semantic mapping module:
- infers semantic information from each keyframe image,
- assigns semantic features to keyframe keypoints,
- and propagates those features to the corresponding sparse map points.
The semantic mapping module runs after local mapping refines a keyframe and before loop closure and volumetric integration. When volumetric mapping is enabled together with the semantics module, volumetric integration waits until a keyframe’s semantic prediction is available before processing it.
- Labels: categorical class IDs; stored on keypoints/map points and used for fusion, visualization, and semantic weighting.
- Probability vectors: per-class confidence/probability scores; fused across observations to estimate robust semantics.
- Feature vectors: latent embeddings used for open-vocabulary semantic mapping and similarity-based inference.
The semantic mapping module can potentially be “dense” or “object-based”; both are intended to expose the same interface.
The currently implemented version is Dense: it runs per-pixel semantic segmentation on keyframe images, assigns semantic descriptors to keypoints, and fuses them into the corresponding sparse map points.
An Object-based variant is currently implemented only in combination with the volumetric module, where object segments are grouped 3D points with shared semantic class and object IDs (which are still extracted from keyframe images and then backprojected and integrated into voxels).
Segmentation models are implemented on the top of a base class SemanticSegmentationBase, which offers the following main methods:
infer: returns semantic images.sem_img_to_rgb: converts semantic outputs into color maps.

Different models are available. See the following video for a quick preview.
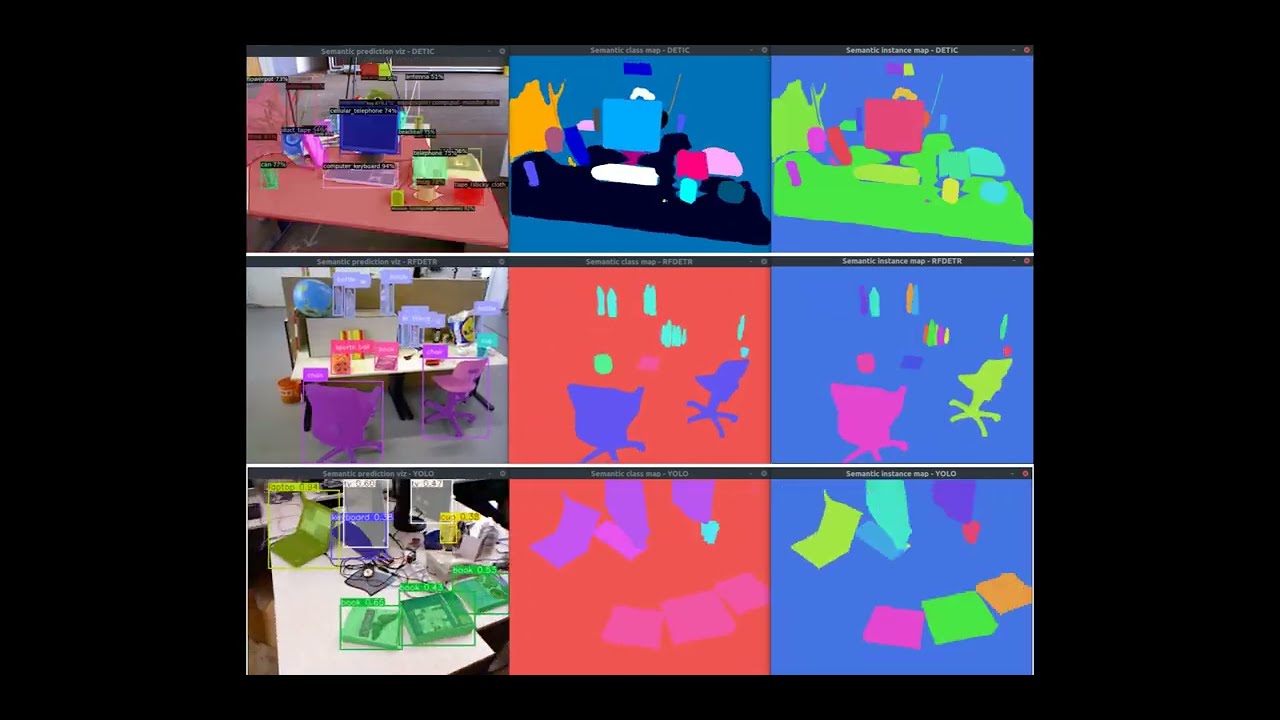
Panoptic/Instance segmentation:
DETIC: from https://github.com/facebookresearch/Detic- Object detection-based (CenterNet2 + CLIP), supports large vocabularies (LVIS/COCO/OpenImages/Objects365).
- Architecture: Object detector (CenterNet2) detects individual objects first, then segments each detection.
- Can output both "instances" (direct instance segmentation) and "panoptic_seg" formats.
- Instance extraction: Direct from object detections - each detected object = one instance ID.
- Result: Robust instance segmentation - each detected object gets a unique instance ID, even for multiple objects of the same category (e.g., two pillows = two separate instances).
ODISE: from https://github.com/NVlabs/ODISE- Diffusion-based panoptic segmentation, leverages diffusion models for segmentation.
- Architecture: Panoptic segmentation model that segments image into regions first, then classifies regions.
- Only outputs "panoptic_seg" format - instances extracted from panoptic segments via "isthing" flag.
- Instance extraction: Derived from panoptic segments - one segment may contain multiple objects if model groups them together (e.g., spatially connected objects of same category).
- Result: Instance segmentation may merge multiple objects of the same category into a single instance (e.g., two pillows may be detected as one "pillow" instance).
EOV_SEG: from https://github.com/nhw649/EOV-Seg- Dual-backbone (CNN + ViT) with CLIP, text-prompt driven open vocabulary.
- Architecture: Panoptic segmentation model (similar to ODISE) - segments image into regions first.
- Only outputs "panoptic_seg" format - instances extracted from panoptic segments via "isthing" flag.
- Instance extraction: Same as
ODISE- derived from panoptic segments, may group multiple objects. - Result: Similar to
ODISE, instance segmentation may group multiple objects of the same category together (e.g., two pillows may be detected as one "pillow" instance).
Semantic segmentation only:
DEEPLABV3: fromtorchvision, pre-trained on COCO/VOC.- Semantic segmentation model from torchvision DeepLab's v3.
SEGFORMER: fromtransformers, pre-trained on Cityscapes or ADE20k.- Semantic segmentation model from transformer's Segformer.
CLIP: fromf3rmpackage for open-vocabulary support.- Uses CLIP patch embeddings + text similarity to produce labels/probabilities (it is not a dedicated "segmentation head").
Instance segmentation:
RFDETR: from https://github.com/roboflow/rf-detr.git- RF-DETR instance segmentation; pretrained weights target COCO classes by default.
YOLO: from https://github.com/ultralytics/ultralytics
- Trained for a “dataset type” managing label-color mappings and equivalence mappings.
- Special dataset types for open-vocabulary:
- closed_set: user-defined labels and generic color map
- feature_sim: similarity map based on a query word
Features are fused from KPs into MPs using one of the fusion methods available here.

Semantic volumetric mapping fuses per-keyframe semantic predictions into a dense 3D voxel grid, enabling semantic-aware reconstruction and optional object-level segmentation. The semantic volumetric integrators live in pyslam/dense and rely on semantic predictions produced by pyslam/semantics.
Two semantic fusion backends are supported:
- Confidence-counter fusion (
VOXEL_SEMANTIC_GRID): stores the most frequent class with a confidence counter. - Probabilistic fusion (
VOXEL_SEMANTIC_PROBABILISTIC_GRID): maintains class probability distributions with Bayesian fusion (recommended for robustness).
- Semantic prediction:
SemanticMappingDense(orSemanticMappingDenseProcess) runs asynchronously and producessemantic_imgand optionalsemantic_instances_imgfor each keyframe. - Synchronization: the volumetric integrator waits until a keyframe reports
is_semantics_available()before integration. - Rectification: semantic, color, and depth images are rectified/undistorted to match the depth camera model.
- Point cloud generation: depth is converted to 3D points and each point is tagged with its semantic label (and instance ID if available).
- Voxel integration: points are fused into the voxel grid using the selected semantic fusion backend.
Minimal enablement:
kDoSparseSemanticMappingAndSegmentation=True # enable sparse mapping + semantic prediction
kDoVolumetricIntegration = True # enable volumetric integration
kVolumetricIntegrationType = "VOXEL_SEMANTIC_PROBABILISTIC_GRID" # or "VOXEL_SEMANTIC_GRID"Common semantic volumetric parameters (see pyslam/config_parameters.py):
kVolumetricIntegrationUseVoxelBlocks: use voxel blocks (memory efficient, default on).kVolumetricIntegrationVoxelGridUseCarving: enable voxel carving with depth constraints.kVolumetricSemanticProbabilisticIntegrationUseDepth: enable depth-weighted confidence (probabilistic).kVolumetricSemanticProbabilisticIntegrationDepthThresholdIndoor/Outdoor: depth threshold for full confidence.kVolumetricSemanticProbabilisticIntegrationDepthDecayRateIndoor/Outdoor: exponential decay rate beyond threshold.kVolumetricSemanticIntegrationUseInstanceIds: enable 2D instance-to-3D object association.kVolumetricSemanticIntegrationMinVoteRatio/kVolumetricSemanticIntegrationMinVotes: voting filters for object IDs.
If kVolumetricSemanticIntegrationUseInstanceIds=True, the integrator uses 2D instance IDs (from panoptic/instance segmentation backends) to build 3D object segments. Object IDs are assigned via a voting scheme across observations, filtered by minimum vote ratio and count. This enables:
- 3D object grouping and colorization by instance ID.
- Stable object identities across multiple views.
In particular, use the following GUI buttons to toggle:
Colors semantics: class/label color maps on both the 3D sparse map and the volumetric map.Objects: per-object color map on the volumetric map (requires instance IDs).Draw object BBs: bounding boxes for detected 3D object segments.
The following list summarizes known limitations of volumetric semantic mapping:
- Resolution limits: A fixed voxel size may blur thin structures and small objects.
- Pose drift sensitivity: Accumulated pose errors can smear semantic labels over time.
- Instance ID dependence: Inconsistent or noisy 2D instance IDs may lead to fragmented or unstable 3D objects.
- Class imbalance bias: Frequently observed classes may dominate both voting-based and probabilistic fusion, especially when class priors are implicit or unbalanced in the predictions.
- Temporal class inconsistency: Inconsistent semantic predictions across keyframes (e.g., label flickering or competing classes with similar confidence) may result in fragmented or unstable voxel labeling, even in densely observed areas.
- Occlusions and visibility gaps: Poorly observed regions may remain unlabeled or receive too few votes, increasing the risk of misclassification.
- Synchronization: When semantic mapping is enabled, volumetric integration waits for semantic predictions before processing keyframes.
- Performance: Probabilistic fusion is more accurate but more compute-intensive than confidence counters.
- Memory: Voxel blocks reduce memory at large scales (
kVolumetricIntegrationUseVoxelBlocks=True).
Further information about volumetric integration models and implementation details are available in cpp/volumetric/README.md.

This diagram outlines the architecture of the Semantic Mapping module. At its core is the semantic_mapping_factory, which creates semantic mapping instances according to the selected semantic_mapping_type. Currently, the supported type is DENSE, which instantiates either the SemanticMappingDense class or the SemanticMappingDenseProcess class if Parameters.kSemanticMappingMoveSemanticSegmentationToSeparateProcess=True. Both these classes extend SemanticMappingDenseBase and runs asynchronously in a dedicated thread to process keyframes as they become available. In particular, the SemanticMappingDenseProcess class offloads semantic segmentation inference to a separate process, thereby making better use of CPU core parallelism.
SemanticMappingDense and SemanticMappingDenseProcess integrate semantic information into the SLAM map by leveraging per-keyframe predictions from a semantic segmentation model. The segmentation model is instantiated via the semantic_segmentation_factory, based on the selected semantic_segmentation_type. Supported segmentation backends include DEEPLABV3, SEGFORMER, CLIP, EOV_SEG, DETIC, RFDETR, YOLO, and ODISE, each of which corresponds to a dedicated class (SemanticSegmentationDeepLabV3, SemanticSegmentationSegformer, SemanticSegmentationCLIP, SemanticSegmentationEovSeg, SemanticSegmentationDetic, SemanticSegmentationRfDetr, SemanticSegmentationYolo, and SemanticSegmentationOdise) inheriting from the shared SemanticSegmentationBase.
The system supports multiple semantic feature representations - such as categorical labels, probability vectors, and high-dimensional feature embeddings - and fuses them into the map using configurable methods like count-based fusion, Bayesian fusion, or feature averaging.
This modular design decouples semantic segmentation from mapping logic, enabling flexible combinations of segmentation models, datasets (e.g., NYU40, Cityscapes), and fusion strategies. It also supports customization via configuration files or programmatic APIs for dataset-specific tuning or deployment.
The section Supported semantic segmentation methods provides a list of supported semantic segmentation methods.
This paper provides a presentation of the first version of sparse semantic mapping module. "Semantic pySLAM: Unifying semantic mapping approaches under the same framework", David Morilla-Cabello, Eduardo Montijano
Sparse semantic mapping
It is possible to visualize both in 2D and 3D the:
- Label color maps of the sparse map points.
- Similarity heatmaps (open vocab).
Volumetric semantic mapping
When volumetric semantic mapping is enabled, use the SLAM GUI to toggle:
Colors semantics: class/label color maps on both the 3D sparse map and the volumetric map.Objects: per-object color map on the volumetric map (requires instance IDs).Draw object BBs: bounding boxes for detected 3D object segments.
- Investigate variants in KF count for
LABELvsPROBABILITY_VECTOR - Implement object-level semantic mapping [WIP]
- Add interaction in 3D viewer to change query word (open-vocab)